
Plaats van herkomst:
China
Merknaam:
YOUNGYOU
Certificering:
CE
Modelnummer:
PY4030U-050
Contact de V.S.
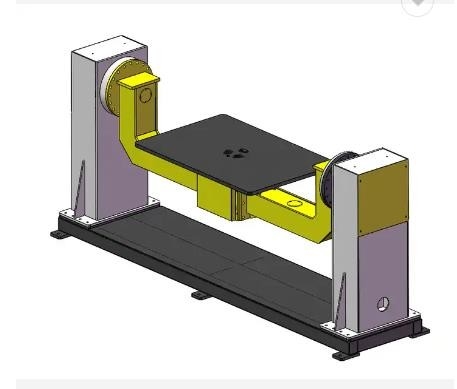




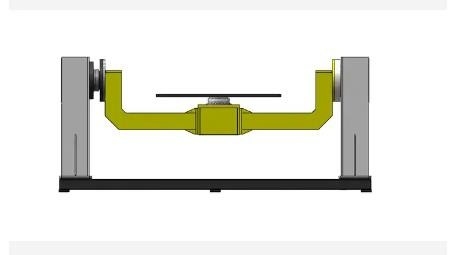
Gemaakt in van de de Draaischijf380v As 50-60hz van China 1200*1200 instelmechanisme van het de ladings100-1000kg het Tweeassige lassen
Lichte bezinningsnavigatie en het plaatsen technologie voor mobiele robots
De typische lichte bezinningsnavigatie het plaatsen methode gebruikt hoofdzakelijk laser of infrarode sensoren voor zich het uitstrekken. De laser en infrared zowel gebruiken lichte bezinningstechnologie voor navigatie als het plaatsen.
Het laser globale plaatsende systeem bestaat over het algemeen uit een laser roterend mechanisme, een reflector, een optoelectronic ontvangend apparaat, en een gegevensverzameling en transmissieapparaat.
Tijdens verrichting, wordt de laser uitgezonden naar buiten door een roterende spiegelmechanisme. Wanneer het aftasten van een behulpzaam die oriëntatiepunt uit een achterwaartse reflector wordt samengesteld, wordt het weerspiegelde licht verwerkt door een foto-elektrische ontvanger als opsporingssignaal. Het gegevensverzamelingprogramma is begonnen om de gegevens van de codeschijf van het roterende mechanisme (de gemeten hoekwaarde van het doel) te lezen, en aan de hogere computer voor gegevens - verwerking door mededeling dan overgebracht. Gebaseerd op de bekende positie van het oriëntatiepunt en de ontdekte informatie, kunnen de huidige positie en de richting van de sensor in het oriëntatiepunt gecoördineerde systeem worden berekend om het verdere navigatie en plaatsen te bereiken.
De laser die heeft de voordelen van zich smalle straal, goed parallellisme, het kleine verspreiden, en hoge resolutie in uitstrekkende richting uitstrekken zich, maar het wordt ook zeer beïnvloed door milieufactoren. Daarom hoe te denoise het verzamelde signaal wanneer het gebruiken van laser die is ook een belangrijke uitdaging uitstrekken zich. Bovendien heeft de laser die zich ook blinde vlekken, makend het moeilijk om navigatie te bereiken en alleen plaatsend door laser uitstrekken. In industriële toepassingen, over het algemeen, wordt het nog wijd gebruikt in het industriële testen ter plaatse binnen een specifieke waaier, zoals het ontdekken van pijpleidingsbarsten.
De infrarode het ontdekken technologie wordt vaak gebruikt in multi gezamenlijke het vermijdensystemen van de robothindernis om een groot gebied van robot „gevoelige huid“ te vormen dat de oppervlakte van het robotwapen behandelt en diverse die voorwerpen kan ontdekken door het robotwapen tijdens verrichting worden ontmoet.
Een typische infrarode sensor omvat een lichtgevende diode in vaste toestand die infrarood licht en een fotogevoelige diode in vaste toestand kan uitzenden die als ontvanger dient. Het gemoduleerde signaal wordt uitgezonden door een infrarode lichte uitzendende buis, en de infrarode fotogevoelige buis ontvangt het infrarode gemoduleerde die signaal door het doel wordt weerspiegeld. De verwijdering van milieu infrarode interferentie wordt verzekerd door signaalmodulatie en een specifieke infrarode filter. Als het outputsignaal Vo de voltageoutput van de weerspiegelde lichtintensiteit vertegenwoordigt, dan is Vo een functie van de afstand tussen de sonde en het werkstuk: Vo=f (x, p), waar p de bezinningscoëfficiënt van het werkstuk is. P is verwant met de oppervlaktekleur en de ruwheid van het doelvoorwerp. X - Afstand tussen de sonde en het werkstuk.
Wanneer het werkstuk een doel van hetzelfde type met dezelfde p-waarde is, corresponderen x en Vo afzonderlijk. X kan worden verkregen door de experimentele gegevens van nabijheidsmetingen van diverse doelvoorwerpen te interpoleren. Op deze wijze, kunnen de afstand tussen de robot en het doelvoorwerp worden gemeten gebruikend infrarode sensoren, en andere informatieverwerkingsmethodes kunnen ook worden gebruikt om van de mobiele robot te navigeren en de plaats te bepalen.
Hoewel het infrarode het ontdekken plaatsen ook voordelen zoals hoge gevoeligheid heeft, eenvoudige structuur, en lage kosten, wegens hun hoge hoekresolutie en lage afstandsresolutie, worden zij algemeen gebruikt als nabijheidssensoren in mobiele robots om naderbij komen of plotselinge bewegingshindernissen te ontdekken, die noodsituatie het tegenhouden van robots vergemakkelijken.
![]()
Ongeveer het bedrijf
Ons gidsspoor heeft met vele internationale bekende robotmerken, zoals ABB KUKA FANUC Yaskawa UR samengewerkt. De bedrijven hoofdzakelijk in kwestie omvatten het palletiseren, lading en het leegmaken. De lading van het gidsspoor gaat van 500kg tot 5000kg. De lengte van het gidsspoor wordt aangepast volgens de behoeften van klanten. Wij hebben een geval dat een robot van ABB IRB6700 beantwoorden aan 20 CNC machines gemaakt, en een 50m lang gidsspoor de het vergeldende motie, de lading en leegmaken van de robot voltooit. Het aantal robots wordt zeer verminderd en de integratiekosten worden bespaard.
Ons bedrijf biedt ook industriële robots aan zeer gunstige prijzen aan om orden aan lagere prijzen samen te plaatsen.
Onthaal aan Shanghai, China, om onze robots en sporen te onderzoeken!
De Levering van het bedrijfproduct
ABB-robot
KUKA-robot
Yaskawarobot
Fanucrobot
UR robot
Cobot
Gidsspoor
Cobot in China wordt gemaakt dat
Productspecificaties
De lijst van productparameters


Verpakking en Vervoer
![]()
![]()
Rechtstreeks uw onderzoek naar verzend ons




