

2023-07-12
2. De behandeling van de Kortsluitingfout van ABB-de Raad van de de Modulekortsluiting van de Robotmacht
Menselijke factoren: De hotswappinghardware is zeer gevaarlijk, en vele mislukkingen van de kringsraad worden veroorzaakt door hotswapping. Het ongepaste gebruik van kracht wanneer het opnemen van kaarten en stoppen met macht kan schade aan interfaces, spaanders veroorzaken, enz., die tot schade aan de raad van de robotkring leiden; Aangezien de tijd van het gebruiken van robots stijgt, zullen de componenten op de raad van de robotkring natuurlijk verouderen, leidend tot de raadsmislukkingen van de robotkring.
Milieufactoren: wegens ongepast onderhoud door de exploitant, is de raad van de robotkring omvat met stof, dat signaalkortsluitingen kan veroorzaken.
3. Wanneer het noodzakelijk voor reserve industriële robots is
Na het eerste vermogen van de nieuwe machine.
Alvorens om het even welke wijzigingen te maken.
3. Na de voltooiing van de wijzigingen.
4. Als de industriële robots belangrijk zijn, zouden zij één keer in de week periodiek moeten worden gedaan.
5. Het is best om een steun op het USB-station ook te maken.
6. Schrap omhoog regelmatig oude steunen aan vrije harde aandrijvingsruimte.
4. Hoe te om de situatie waar de robot wordt aangezet en het onderwijs te behandelen houdt de tegenhanger tonend de volgende interface
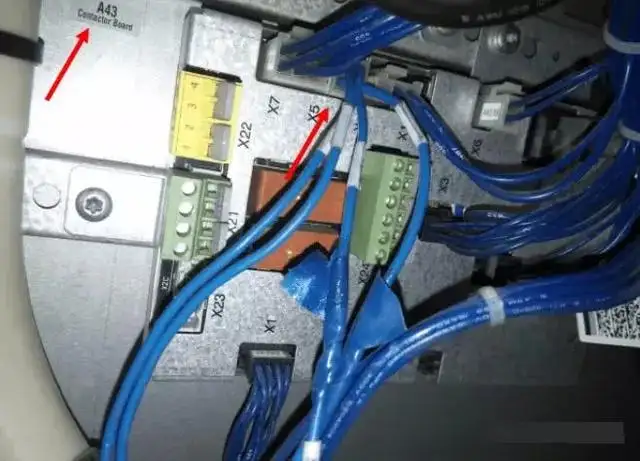
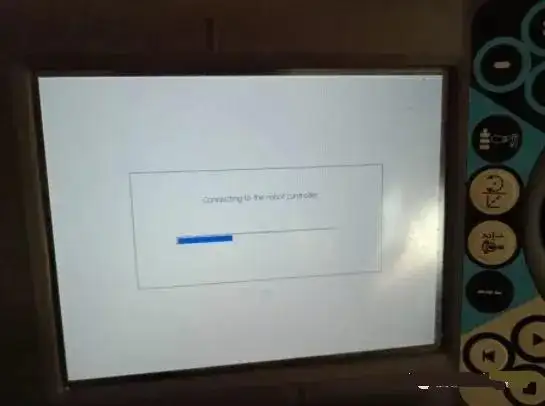 De bovengenoemde situatie is dat er geen communicatie die verbinding tussen de het onderwijstegenhanger en het belangrijkste controlemechanisme van de robot wordt gevestigd is, en de redenen om niet de verbinding te vestigen omvatten:
De bovengenoemde situatie is dat er geen communicatie die verbinding tussen de het onderwijstegenhanger en het belangrijkste controlemechanisme van de robot wordt gevestigd is, en de redenen om niet de verbinding te vestigen omvatten:
1. De robotgastheer is defect.
2. De ingebouwde CF-kaart (SD-geheugenkaart) van de robotgastheer is defect.
3. De netwerkkabel tussen de het onderwijstegenhanger en de gastheer is los, enz.
Verwerkingsprocédé: 1. Controle of de gastheer normaal is en of de SD-geheugenkaart in de gastheer normaal is.
2. Controle als de netwerkkabel van de het onderwijstegenhanger aan de gastheer behoorlijk wordt verbonden.
5. Wat is de betekenis van de 10106 herinnering van de onderhoudstijd wanneer de robot een alarmbericht toont?
Deze situatie is een ABB-herinnering van het robot intelligente periodieke onderhoud.
6. Hoe te om een systeem te behandelen defect wanneer de robot een macht op staat ingaat?
1. Begin eens de robot opnieuw.
Als niet, controleer de het onderwijstegenhanger meer gedetailleerde alarmherinneringen en voer actie.
3. Nieuw begin.
4. Als het nog niet kan worden vrijgegeven, probeer B-opstarten.
5. Als het nog niet werkt, te proberen gelieve p-opstarten.
6. Als het nog niet werkt, te proberen gelieve I-opstarten (dit zal de robot naar zijn fabrieksmontages terugkeren, zal zorgvuldig zijn).
7. Kan de robotsteun door veelvoudige robots worden gedeeld?
Nr. Bijvoorbeeld, kan de steun van robot A slechts voor robot A, niet voor robot B of C worden gebruikt, aangezien dit systeemmislukkingen kan veroorzaken.
8. Welke dossiers kan in robotsteun worden gedeeld?
Als twee robots van hetzelfde model en de configuratie zijn. U kunt het SNELLE programma en EIO-dossier delen, maar na het delen, moet het ook worden geverifieerd alvorens het kan normaal worden gebruikt.
9. Wat is de mechanische oorsprong van robots? Waar is de mechanische oorsprong?
Elk van de zes servomotoren van de robot heeft een unieke vaste mechanische oorsprong. Het onjuiste plaatsen van de mechanische oorsprong van de robot zal problemen zoals beperkte of onjuiste beweging van de robot, het onvermogen veroorzaken om in een rechte lijn te lopen, en de ernstige schade aan de robot.
10. Hoe te om het actie controlealarm van robot 50204 te ontruimen?
1. Wijzig de robotactie controleparameters (in het controlebordactie controlemenu) om de daadwerkelijke situatie aan te passen.
2. Gebruik het AccSet-bevel om de versnelling van de robot te verminderen.
3. Verminder v in snelheid data_ de verrottingsoptie.
11. Hoe te om alarm „50296, SMB-het verschil van geheugengegevens te behandelen“ wanneer de robot voor het eerst ingeschakeld is?
1. Selecteer Kaliberbepaling van het belangrijkste menu van ABB.
2. Klik op ROB_ 1. Ga het kaliberbepalingsscherm in en selecteer SMB-geheugen.
3. Selecteer „Geavanceerd“, ga en klik het „Duidelijke Geheugen van het Controlekabinet“ in.
4. Na voltooiing, klik „Dicht“ en klik dan „Update“.
5. Selecteer ‚Geruild controlekabinet of robotachtig wapen, die controlekabinet met SMB-geheugengegevens‘ bijwerken.
12. Hoe te om de snelheid van de motie van de robotbaan in het SNELLE programma aan te passen?
1. Selecteer Programmagegevens van het belangrijkste menu van de het onderwijstegenhanger.
2. Na het vinden van het gegevenstype Speeddata, klik Nieuw.
3. Klik op de aanvankelijke waarde, en de betekenissen van de vier variabelen Speeddata zijn: v_ TCP vertegenwoordigt de lineaire lopende snelheid van de robot, v_-vertegenwoordigt de Verrotting de rotatiesnelheid van de robot, vertegenwoordigt v_ Leax de lineaire werkende snelheid van de externe as, vertegenwoordigt v_ Reax de rotatiesnelheid van de externe as. Als er geen externe as is, te hoeven laatste twee niet worden gewijzigd.
4. De aangepaste gegevens kunnen in het SNELLE programma worden geroepen.
13. Het oplossen van problemen van 6 Gemeenschappelijke Fouten in ABB-de Reparatie van de Robot Servomotor
1. Hoe te om de tegen de overstromingsfout van de motorfout tijdens hoge snelheidsomwenteling te behandelen?
Komt de tegen de overstromingsfout van de motorfout tijdens hoge snelheidsomwenteling voor.
Tegenmaatregel 1: Controle als de bedrading van de kabel van de motormacht en codeurkabel correct is en als de kabel beschadigd is.
Komt de tegen de overstromingsfout van de motorfout wanneer het invoeren van een lange bevelimpuls voor.
Kwam de tegen de overstromingsfout van de motorfout tijdens verrichting voor.
Tegenmaatregel 2: Verhoog de plaatsende waarde van het overstromingsniveau van de foutenteller; Vertraag de omwentelingssnelheid; Breid de versnelling en vertragingstijd uit; De lading is te zwaar, en het is noodzakelijk om een grotere capaciteitsmotor helemaal opnieuw te selecteren of de lading te verminderen, en transmissieorganisaties zoals reductiemiddelen te installeren om de lading te verhogen.
2. Wat zou als het niet moeten worden gedaan werkt wanneer er impulsoutput is?
Controleer de huidige waarde van de impulsoutput van het controlemechanisme en of het licht van de impulsoutput opvlammend is, erken dat de bevelimpuls normaal is vervuld en nu outputting;
Controle als de controlekabel, de machtskabel, en de codeurkabel van het controlemechanisme aan de bestuurder verkeerd worden getelegrafeerd, beschadigd, of in slecht contact;
Controle als de rem van de servomotor met rem nu is geopend;
Controleer of de commissie van de servobestuurder de input van impulsbevelen erkent;
Het bevel van de Looppasverrichting is normaal;
De controlevorm moet de richtingcontrolevorm kiezen;
Is het type van inputimpuls door de servobestuurder verenigbaar met het plaatsen van de bevelimpuls die wordt geplaatst;
Zorg ervoor dat de positieve omwentelings zijaandrijving wordt tegengehouden, het het eindesignaal van de omwentelings zijaandrijving, en het signaal van het fouten tegenterugstellen wordt niet ingevoerd, is de lading losgemaakt, en de zonder commissie verrichting is normaal. Controleer het mechanische systeem.
3. Wat zou ik als er geen overbelastingsrapport met lading moeten doen is?
Als het voorkomt wanneer het servolooppassignaal wordt verbonden en geen impuls wordt uitgezonden:
Controleer de machtskabel bedrading van de servomotor om te zien of is er om het even welke slechte contact of kabelschade; Als het een servomotor met een rem is, moet de rem worden aangezet; Is de aanwinst van vastgestelde te hoog van de snelheidslijn; Is de integrale tijdsconstante van vastgestelde te klein van de snelheidslijn.
Als de servo slechts defecten tijdens verrichting:
Is de aanwinst van vastgestelde te hoog van de azimutkring; Is de omvang van het plaatsen voltooiings vastgestelde te klein; Controleer als er geen gesloten rotor op de servomotorschacht is en pas helemaal opnieuw de machines aan.
4. Hoe te om abnormale geluiden of trillingen tijdens verrichting te behandelen?
Servo bedrading:
Het gebruik standaardiseerde machtskabels, codeurkabels, controlekabels, en kabels om schade te controleren; Controleer als er interferentiebronnen dichtbij de controlelijn zijn, en als zij aan de nabijgelegen hoge huidige machtskabels parallel of te dicht zijn; Controleer als er om het even welke verandering in het potentieel van de aan de grond zettende terminal is om het uitstekende aan de grond zetten te verzekeren.
Servoparameters:
Het servoaanwinst plaatsen is te groot, en het wordt geadviseerd aan of manueel actief helemaal opnieuw aanpast de servoparameters; Erkennend het plaatsen van de tijdsconstante van de filter van de snelheidsreactie, met een eerste waarde van 0, is het mogelijk om de vastgestelde waarde te verhogen door te testen; De elektronische toestelverhouding het plaatsen is te groot, bepleitend om aan de fabrieksmontages te herstellen; Resonantie tussen servosysteem en mechanisch systeem, het testen en het aanpassen de frequentie en de omvang van de inkepingsfilter.
Mechanisch systeem:
De koppeling die de motorschacht en het materiaalsysteem aansluiten week af, en de installatieschroeven werden niet aangehaald; De slechte overeenkomst van katrollen of toestellen kan ook tot veranderingen in ladingstorsie leiden. Test zonder commissie verrichting. Als de zonder commissie verrichting normaal is, controleer als er om het even welke abnormaliteit in het deel plakkend van het mechanische systeem is; Laat toe of de de de ladingsinertie, torsie, en snelheid te groot zijn, de zonder commissie verrichting, en als de zonder commissie verrichting normaal is testen, de lading verminderen of de bestuurder en de motor met een grotere capaciteit vervangen.
5. Hoe te om de onnauwkeurige richtlijn controle en het plaatsen tijdens ABB-de reparatie van de robot servomotor te behandelen?
_ten eerste, er*kennen of de daadwerkelijk ver*klaren impuls waarde van de controlemechanisme verenigbaar met de ver*wachten waarde, en als niet, controle en ver*beteren de programma;
Controleer of het aantal impulsbevelen door de servobestuurder worden ontvangen aangekondigd door het controlemechanisme dat aanpast. Als niet, controleer de controlekabel; Controleer als plaatsen van de servovorm van de bevelimpuls met het controlemechanisme die, zoals CW/CCW of pulse+direction plaatsen verenigbaar is;
Het servoaanwinst plaatsen is te groot, manueel of te passen gelieve actief helemaal opnieuw de servoaanwinst aan; De servomotor is naar voren gebogen aan geaccumuleerde fouten tijdens vergeldende motie. Het wordt geadviseerd om een mechanisch oorsprongssignaal te plaatsen in de omstandigheden toegestaan door het proces, en de handeling van het oorsprongsonderzoek uit te voeren alvorens de fout de toegestane schaal overschrijdt; Het mechanische systeem zelf heeft lage nauwkeurigheid of abnormale transmissieorganisatie (zoals afwijking van de koppeling tussen de servomotor en het materiaalsysteem).
6. ABB-de reparatie van de robot servomotor, richtingcontroleverrichting, gemelde overdreven snelheidsfout. Hoe te om het te behandelen?
Zodra het servolooppassignaal wordt verbonden, zal het teweegbrengen: controleer als de bedrading van de kabel van de servomotormacht en codeurkabel correct en onbeschadigd is.
14. Hoe ondergaan de industriële robots van ABB routineonderhoud?
Vóór normale bedrijfsvoering van de „reminspectie“, is het noodzakelijk om de motorrem van elke as te controleren. De inspectiemethode voor de motorrem is als volgt:
1. Stel de as van elk robotachtig wapen in zijn maximumladingspositie in werking.
2. Draai de selectie van de motorwijze inschakelen het robotcontrolemechanisme aan de MOTOREN VAN positie.
3. Controle als de schacht in zijn originele positie is. Als het mechanische wapen nog zijn positie handhaaft nadat de motor wordt afgezet, wijst het erop dat de rem in goede staat is.
Gevaar om de functie van de vertragingsverrichting (250mm/s) te verliezen
Verander niet de toestelverhouding of andere motieparameters van de computer of de het onderwijstegenhanger. Dit zal functie de van de vertragingsverrichting (250mm/s) beïnvloeden.
15. Verscheidene punten om aandacht aan te besteden wanneer veilig het gebruiken van het onderwijshulp:
De het toelaten apparatenknoop op de het onderwijstegenhanger wordt geïnstalleerd, wanneer halverwege gedrukt, verandert het systeem in MOTOREN OP wijze die. Wanneer de knoop wordt vrijgegeven of volledig gedrukt, verandert het systeem in MOTOREN VAN wijze.
16. om het onderwijshulp te gebruiken veilig moeten de volgende principes worden gevolgd:
1.When de het Toelaten apparatenknoop niet zijn functie tijdens programmering kan verliezen of het zuiveren, en de robot te hoeven niet zich te bewegen, onmiddellijk versie de het Toelaten apparatenknoop.
2. Wanneer het programmerende personeel een veilig gebied ingaat, moeten zij de het onderwijstegenhanger op hun lichaam altijd dragen om anderen te verhinderen de robot te bewegen.
17. Wanneer het werken binnen de werkende waaier van het robotachtige wapen, moeten de volgende punten waargenomen:
1. De wijzeselectie schakelt het controlemechanisme in moet aan de handpositie worden gedraaid om het het toelaten apparaat in werking te stellen om de computer los te maken of ver te werken;
2. Wanneer de schakelaar van de wijzeselectie is
3. Besteed aandacht aan de omwentelingsas van het robotachtige wapen, ben zorgvuldig wanneer het haar of de kleding omhoog gemengd worden. Ook, besteed aandacht aan ander geselecteerd componenten of materiaal op het robotachtige wapen;
4. Controleer de motorrem van elke as.
18. Aanrakingsafwijking
Fenomeen 1: De positie door de vingers wordt geraakt valt niet met de muispijl die samen.
Reden: Na het installeren van het bestuurdersprogramma, raakte de het onderwijstegenhanger verticaal niet het centrum van de bullseyepositie tijdens kaliberbepaling.
Oplossing: Calibreer de positie opnieuw.
Fenomeen 2: Sommige gebieden hebben nauwkeurige aanraking, terwijl anderen afwijking in aanraking hebben.
Oorzaak: Een hoop van stof of schaal accumuleert op de akoestische bezinningsstrepen rond het touche screen van de Oppervlakte akoestische golf, dat de transmissie van akoestische signalen beïnvloedt.
Oplossing: Maak het touche screen schoon, betalend bijzondere aandacht aan het schoonmaken van de strepen van de correcte golfbezinning aan alle kanten van het touche screen. Wanneer het schoonmaken, maak de voeding van de kaart van de touch screencontrole los.
19. De het onderwijstegenhanger raakt geen reactie
Fenomeen: Wanneer wat betreft het scherm, bewegen de muispijlen zich niet en er is geen verandering in positie.
Reden: Er zijn vele redenen voor dit fenomeen, als volgt:
1. Het stof of de schaal op de akoestische bezinningsstrepen rond het touche screen van de Oppervlakte akoestische golf zijn wordt geaccumuleerd zeer ernstig, veroorzakend het touche screen dat er niet in slagen te werken;
2. Touch screendefect;
3. De kaart van de touch screencontrole heeft defect geweest;
4. De lijn van het touch screensignaal heeft defect geweest;
5. De seriële poort van de gastheerdefecten;
6. Het besturingssysteem van de het onderwijstegenhanger heeft defect geweest;
7. De installatiefout van de touch screenbestuurder.
Oplossing: Neem het de indicatorlicht waar van het touch screensignaal, welke flitsen regelmatig in normale omstandigheden, ongeveer eens per seconde.
Wanneer wat betreft het scherm, gaat de het onderwijstegenhanger zwart, wat een complex probleem is. Als backlight energy-saving wordt geplaatst, is het zwarte scherm normaal; Als het tweede woord in het Systeemvak toevallig in werking wordt gesteld, zal het scherm ook zwart gaan. Als de eerste twee punten uitgesloten zijn, werk aan de recentste ingebouwde programmatuur voor overzicht bij.
Rechtstreeks uw onderzoek naar verzend ons

